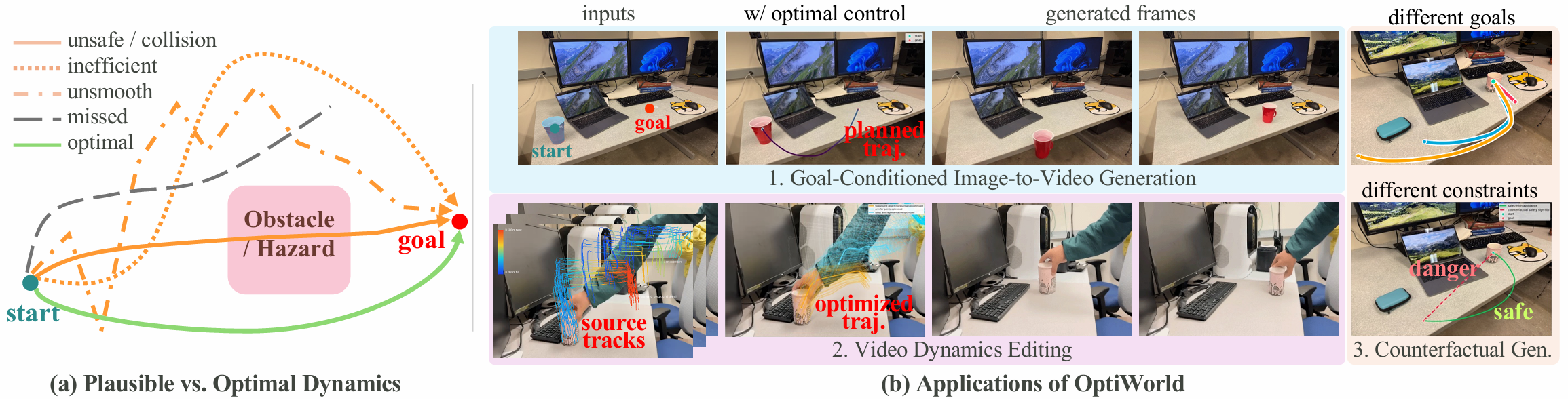
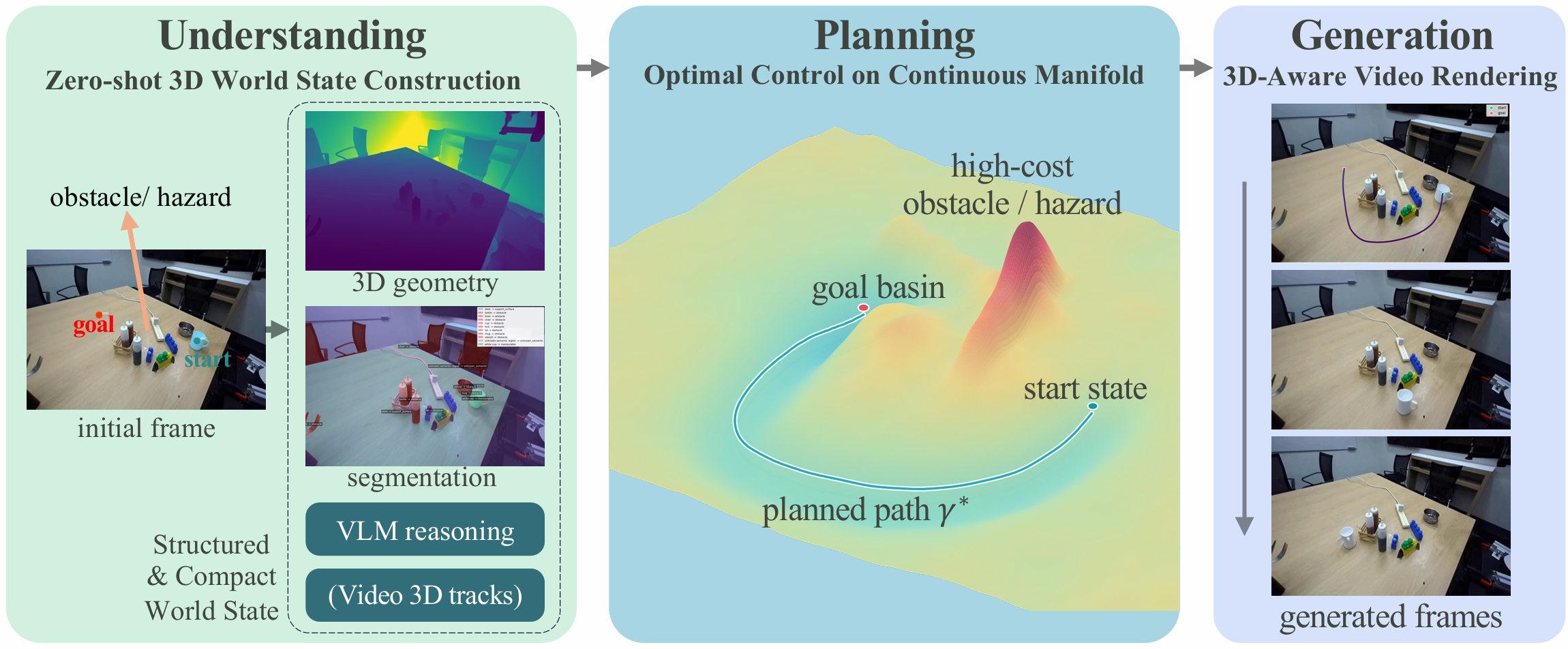
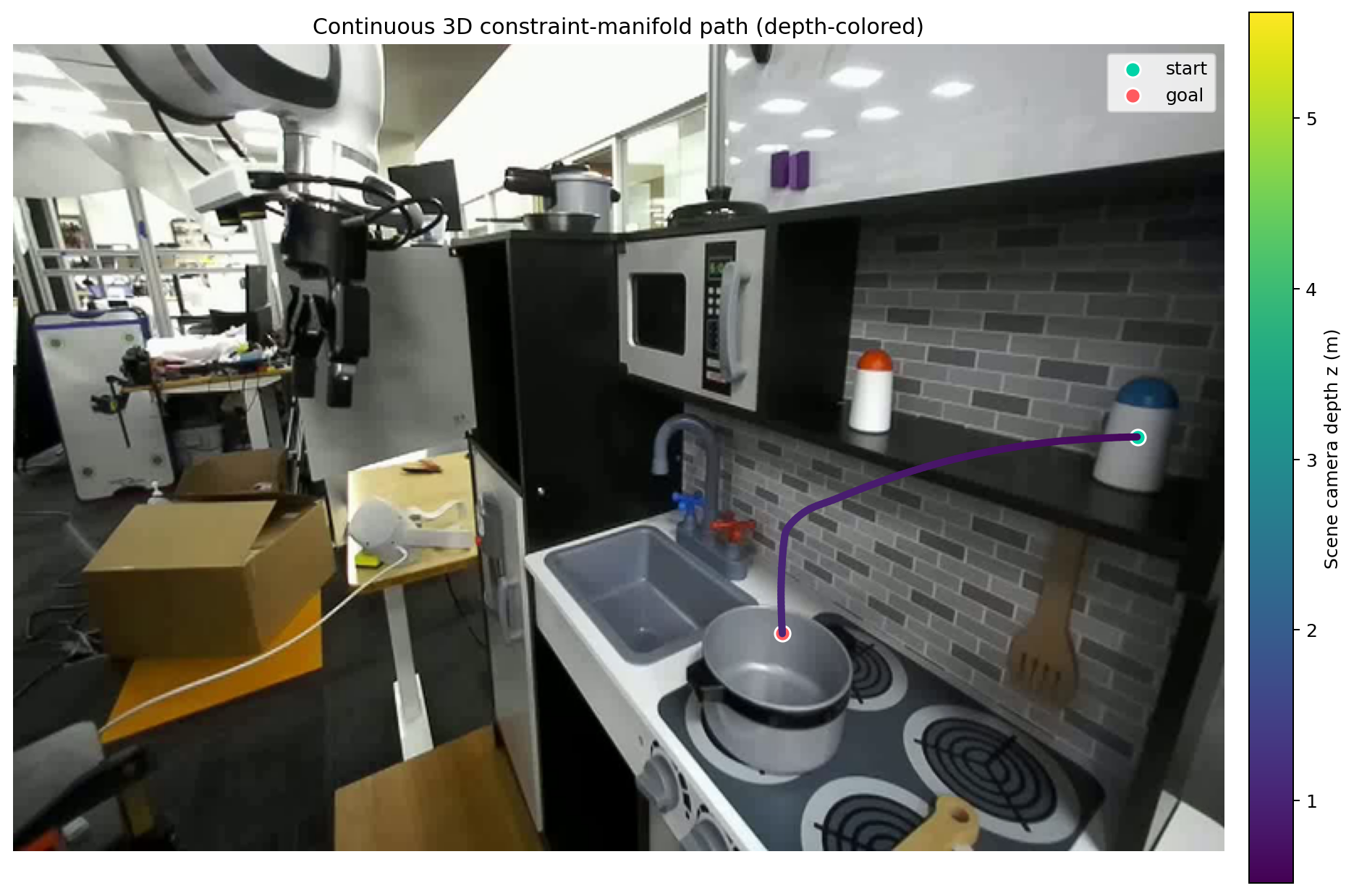
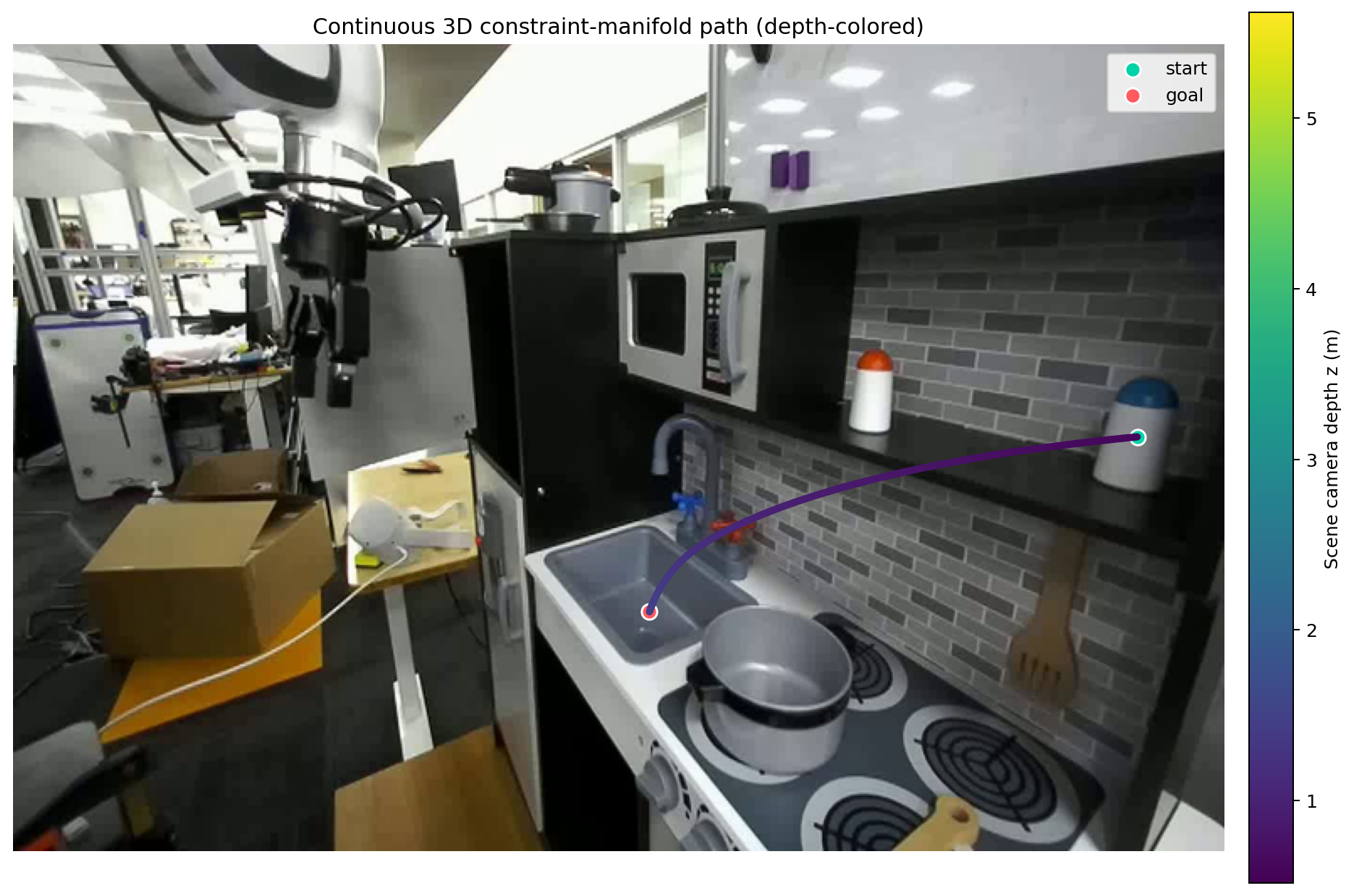
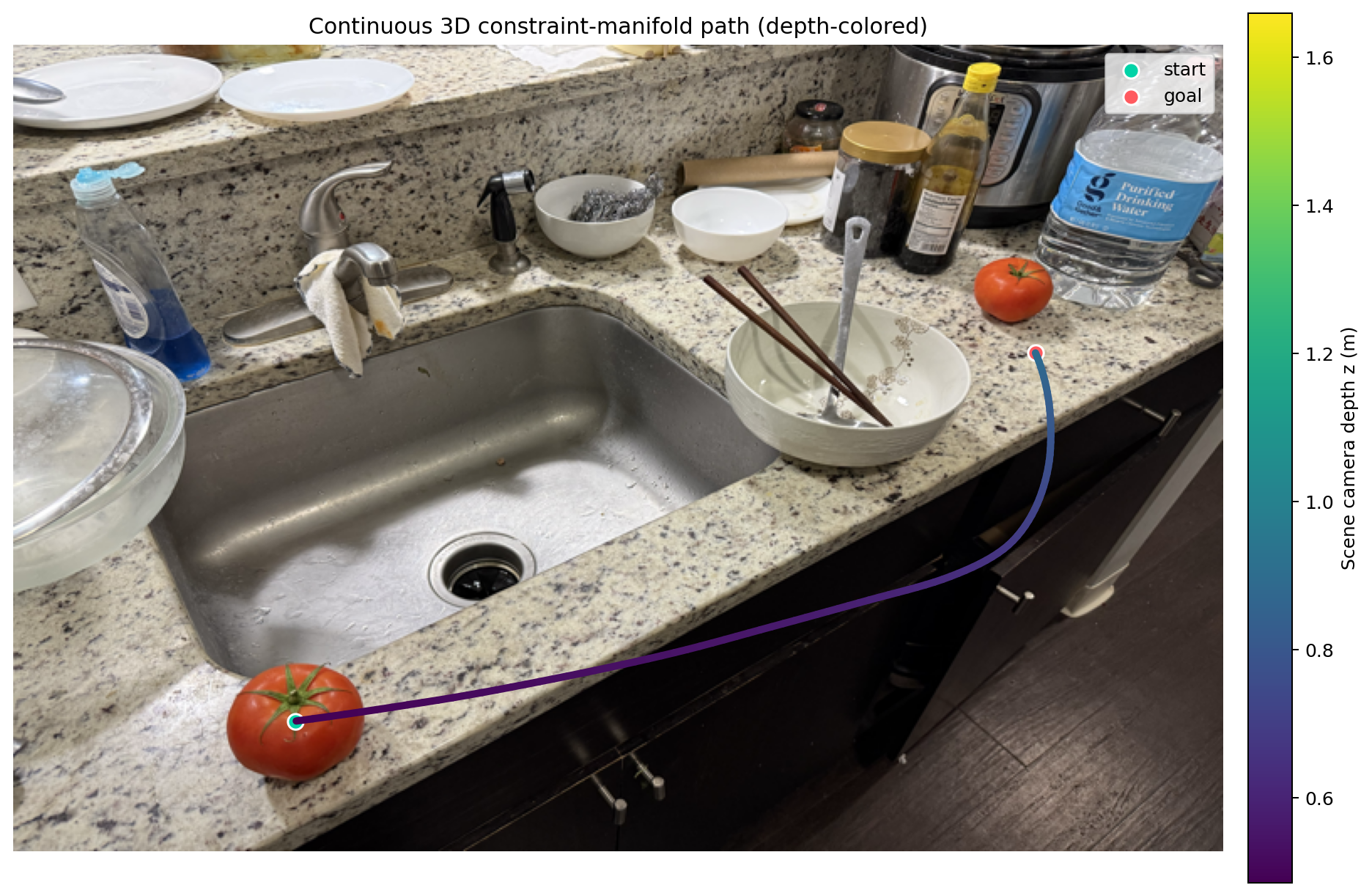
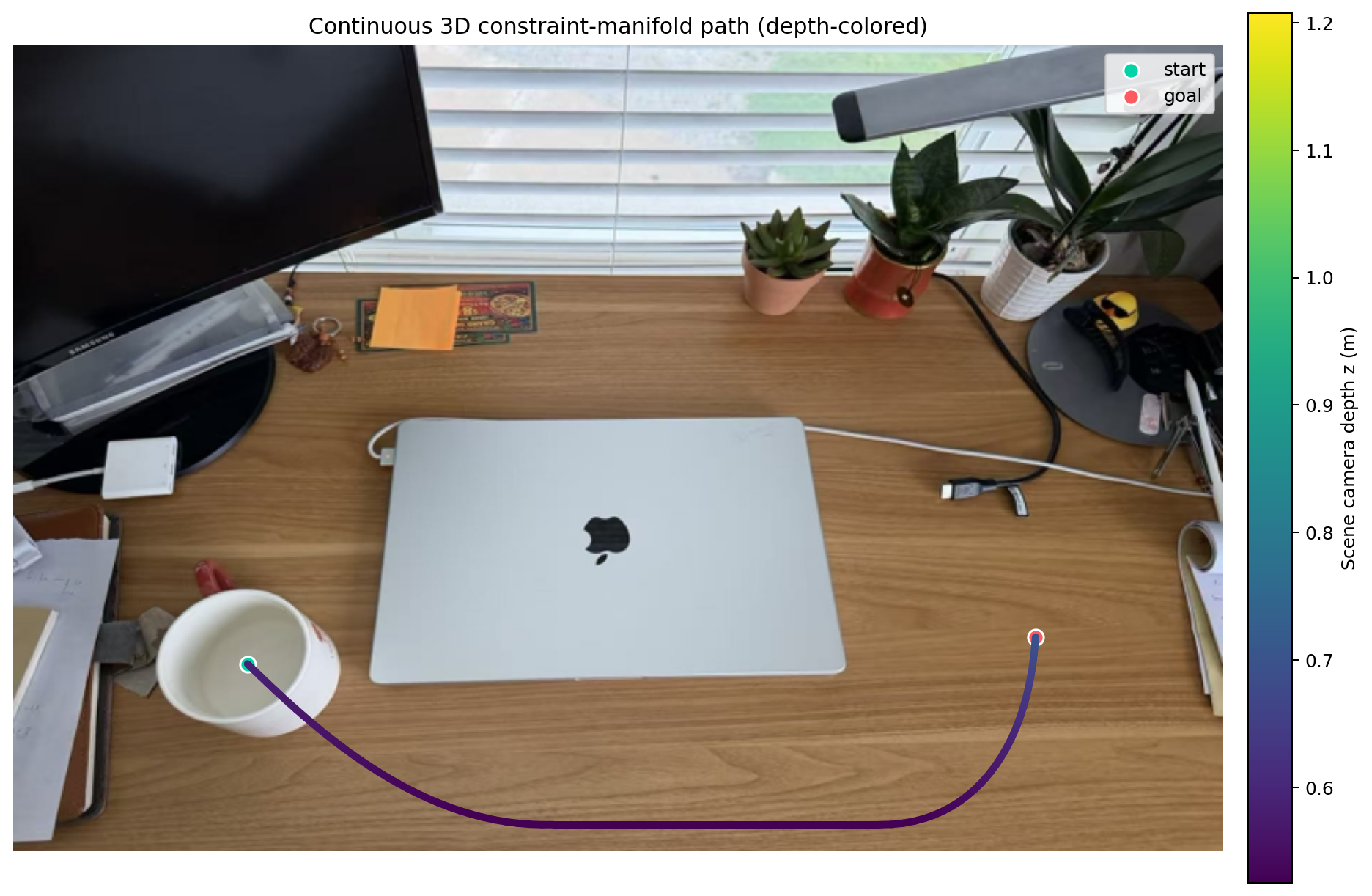
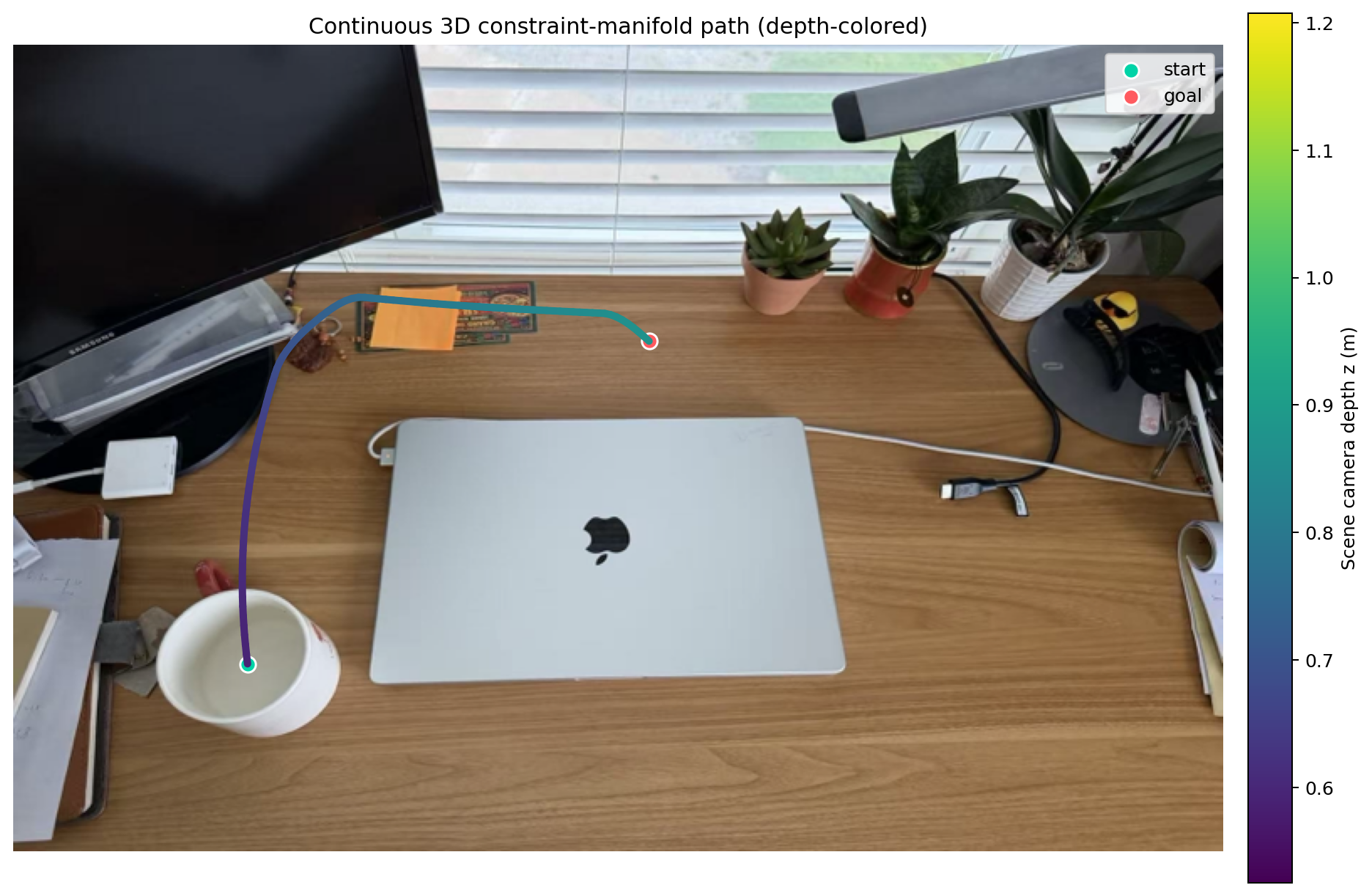
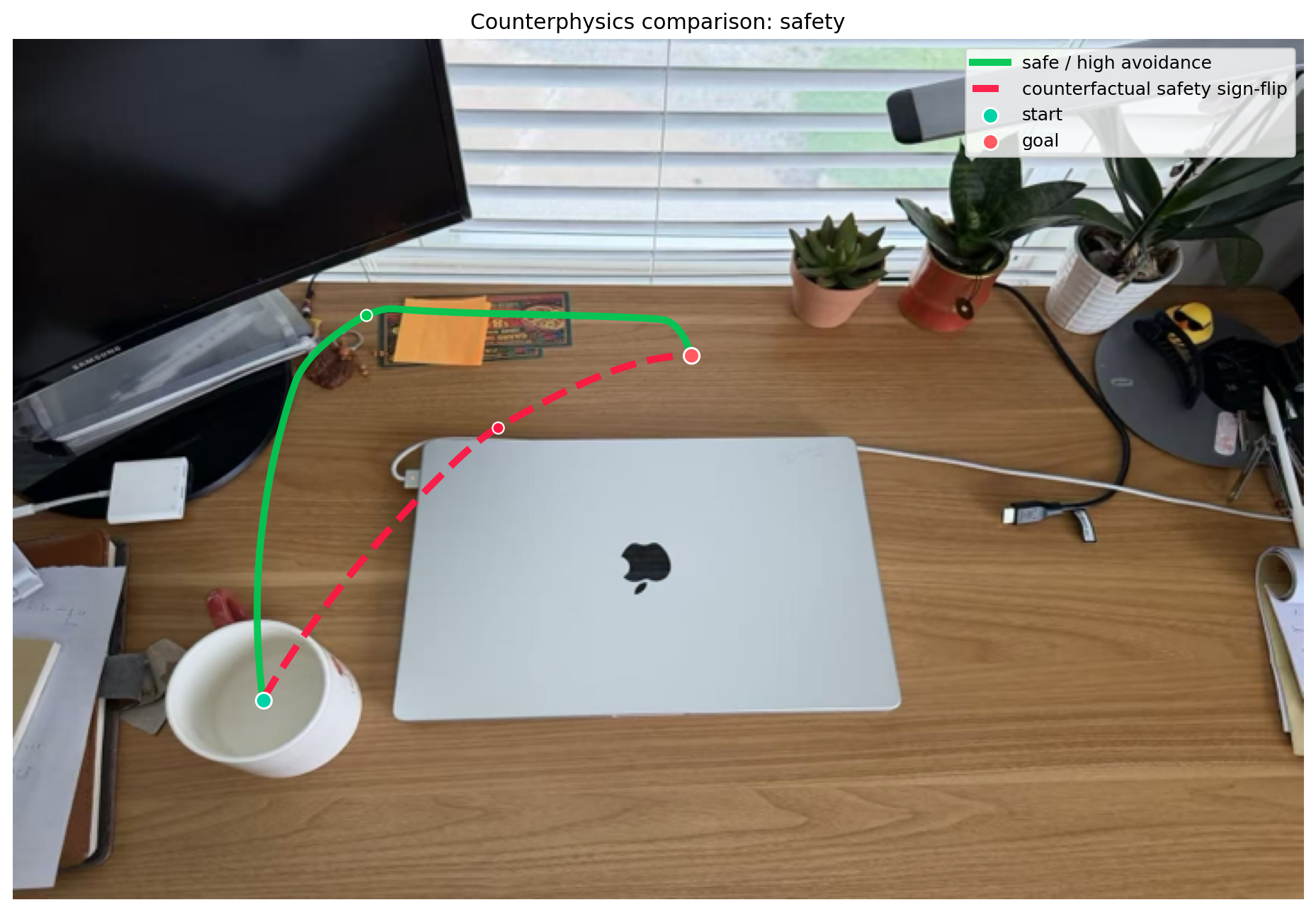
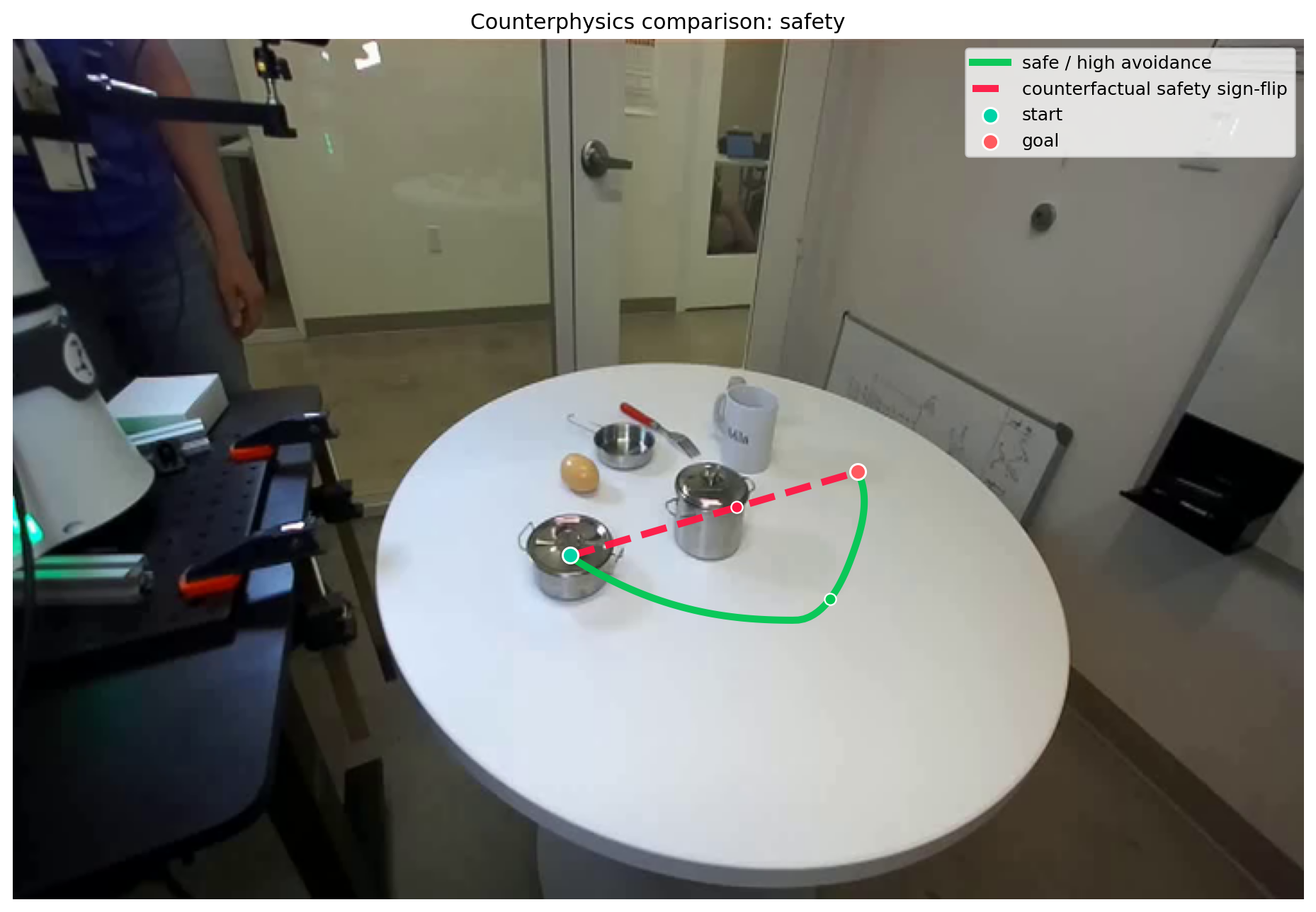
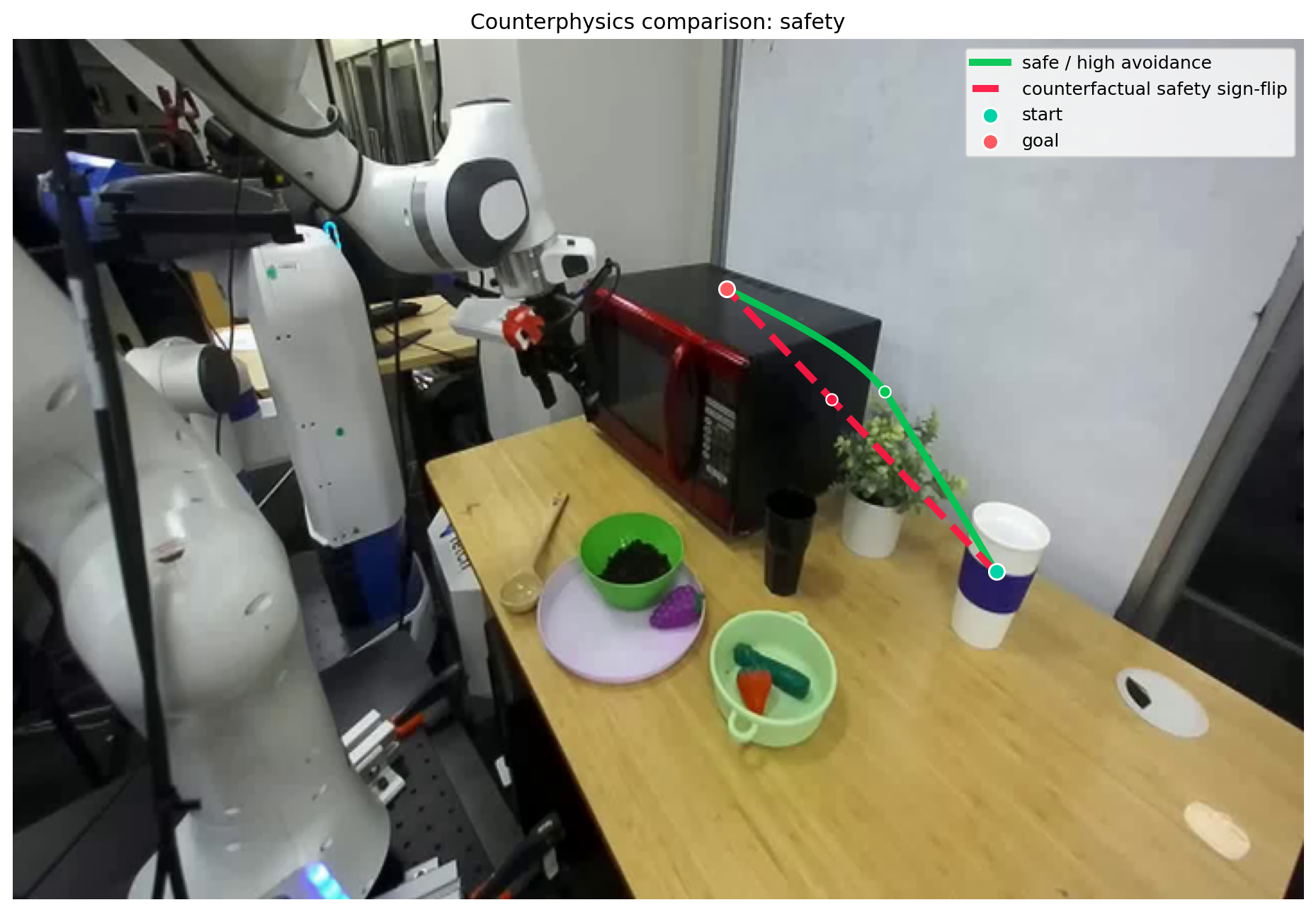
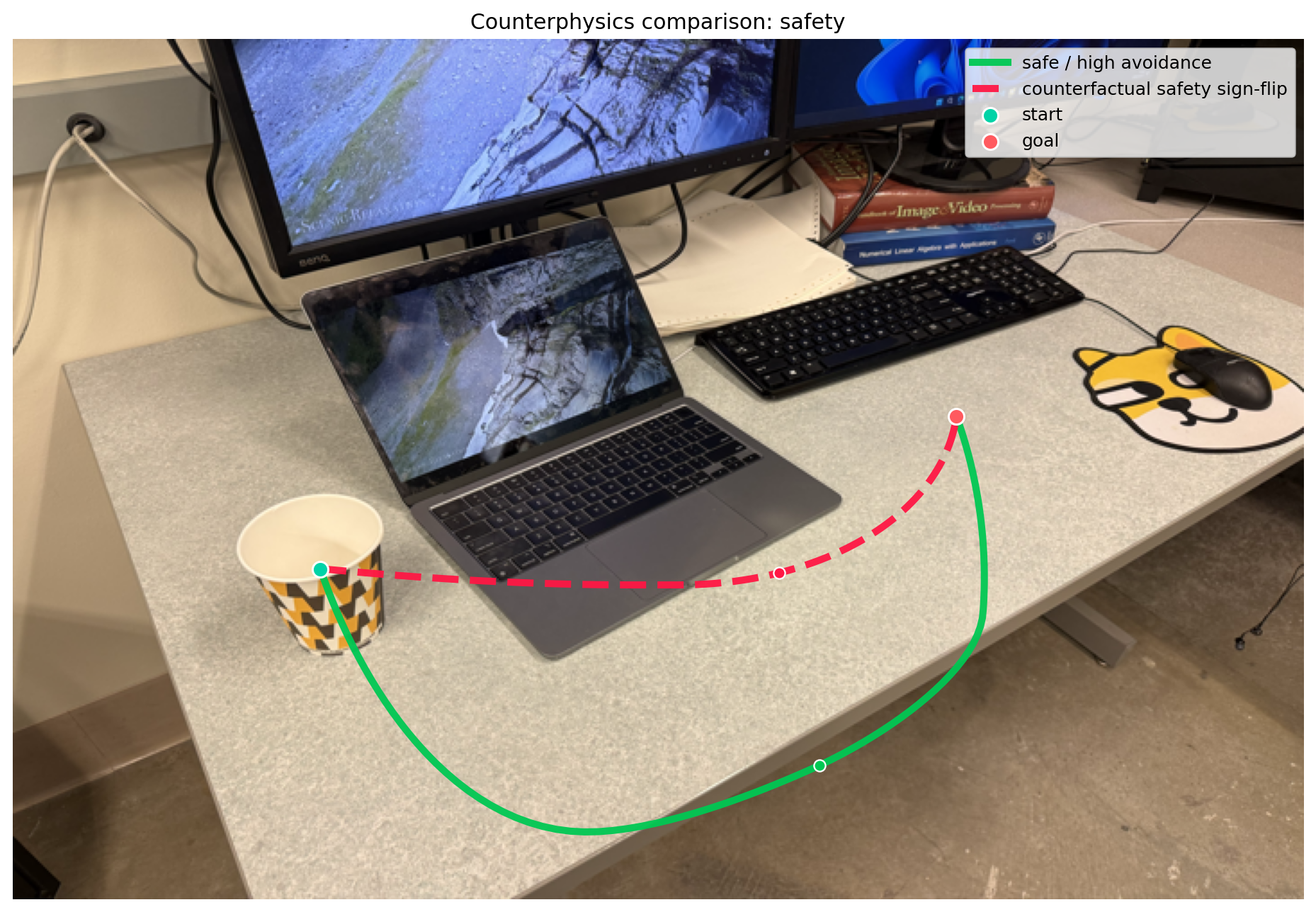
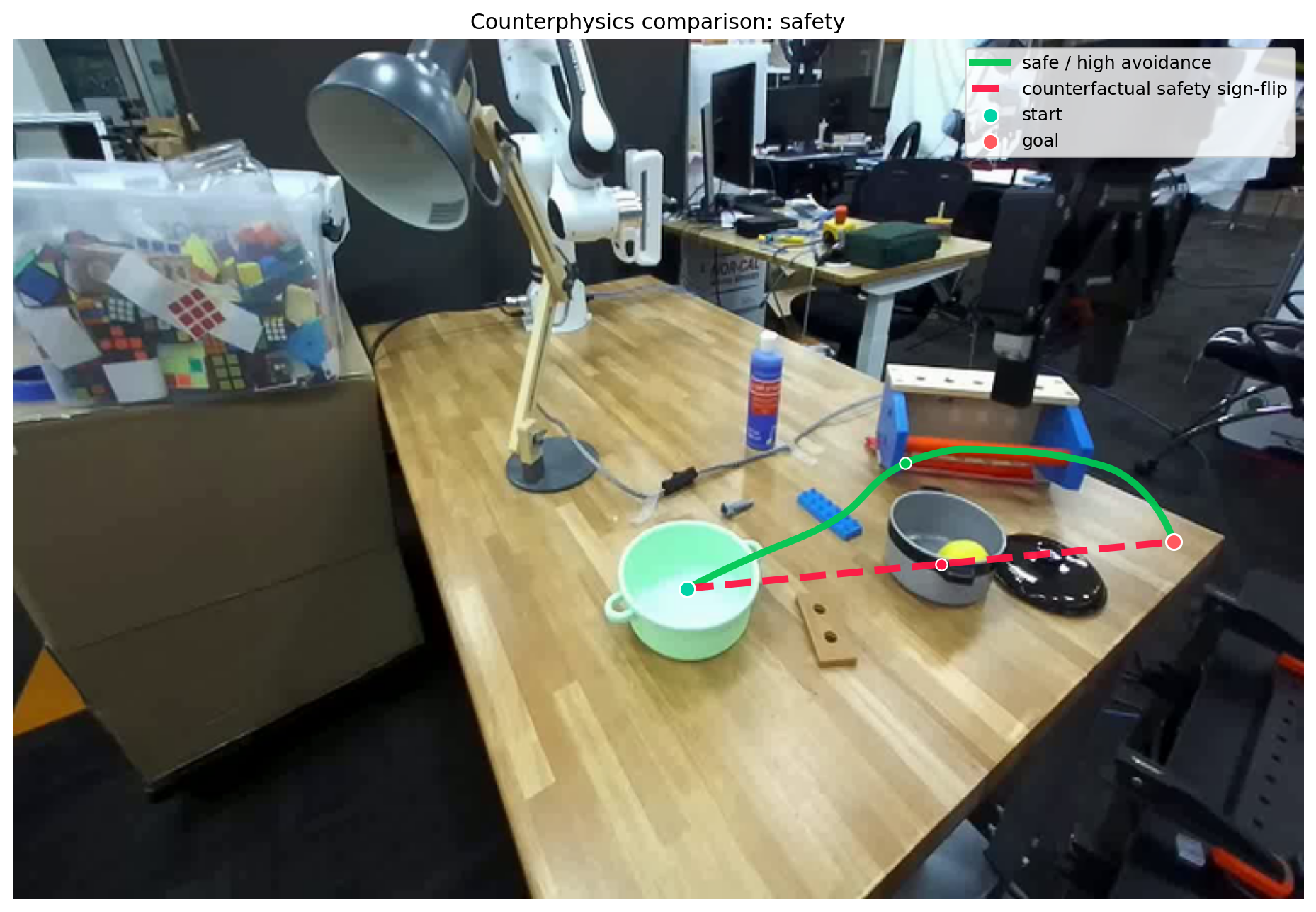
Video generation models are becoming a scalable form of world models, but they mainly generate plausible motion rather than proactively control or optimize the underlying dynamics. As a result, an object in the generated video may follow trajectories that are unsafe, not smooth, inefficient, or physically inconsistent. In this work, we propose OptiWorld, a framework that brings classical optimal control into video generation at inference time. OptiWorld first extracts a compact, task-relevant world state, then plans an optimal trajectory under physical constraints, and finally renders the video conditioned on this trajectory. We formulate planning as a geometric problem on a continuous manifold, which converts 3D geometry and task-dependent physical constraints into a unified planning geometry. By adding this optimal-control layer, OptiWorld generates videos with preferable dynamics across goal-conditioned image-to-video generation, video dynamics editing, and counterfactual generation.